EN
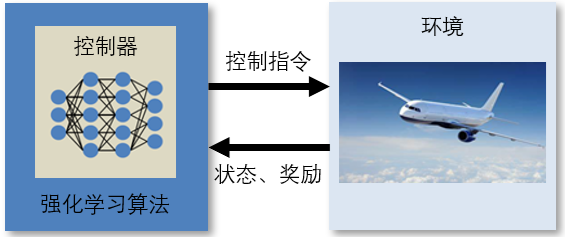
EN 飞行控制与仿真研究方向聚焦飞行器建模与控制,结合人工智能技术,致力于打更安全、更高效、更绿色的未来飞行器与飞行体验,面向鲁棒控制理论的发展及其应用、先进飞行器建模与控制、飞行安全技术、基于人工智能的控制技术等开展研究。
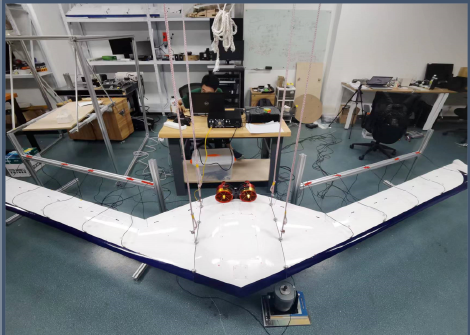
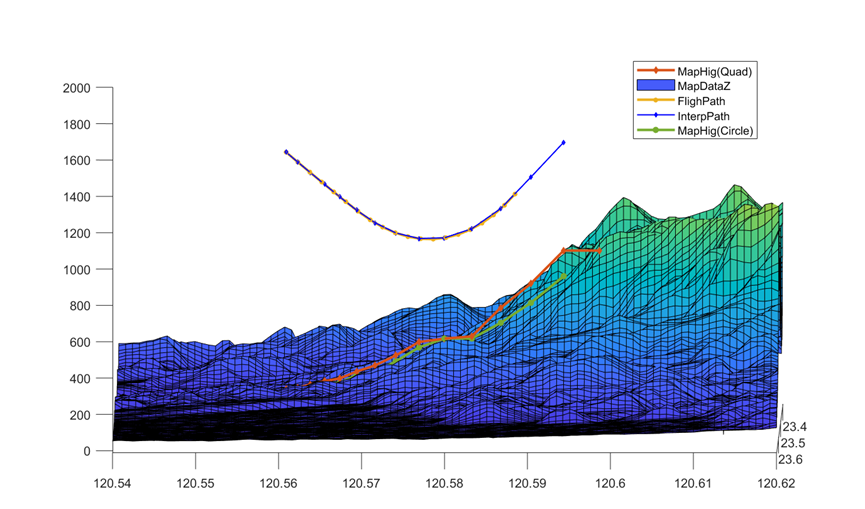
自主设计并制造大展弦比飞翼构型柔性无人机,实现包含非稳态空气动力学、飞行力学、结构动力学的刚柔耦合建模,并针对降维与控制进行深入研究。立足现有eVTOL飞行器平台,实现非线性建模与控制,进行实机飞行验证,旨在建立安全、可靠、高效的eVTOL控制系统。此外,设计自动对地防撞系统、大飞机自动着陆系统、客机失速改出等进行研究。