EN
EN 机器人视觉导航与控制方向聚焦于机器人控制、计算机视觉、视觉导航与控制等方面研究,致力于解决机械臂、移动机器人以及无人机等机器人系统的导航与控制问题。
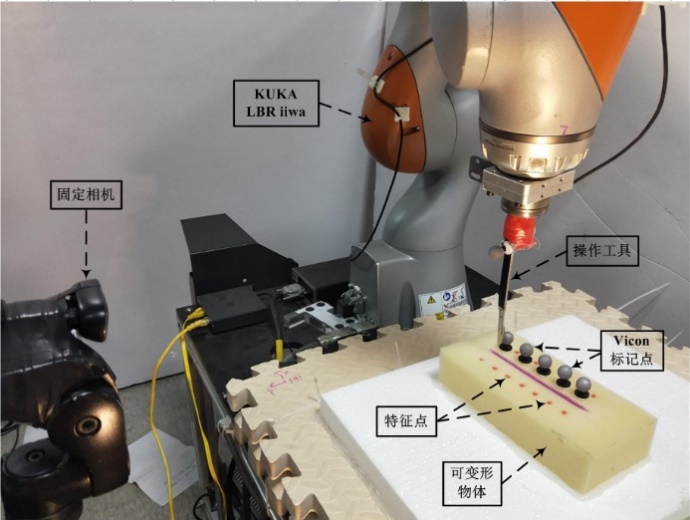
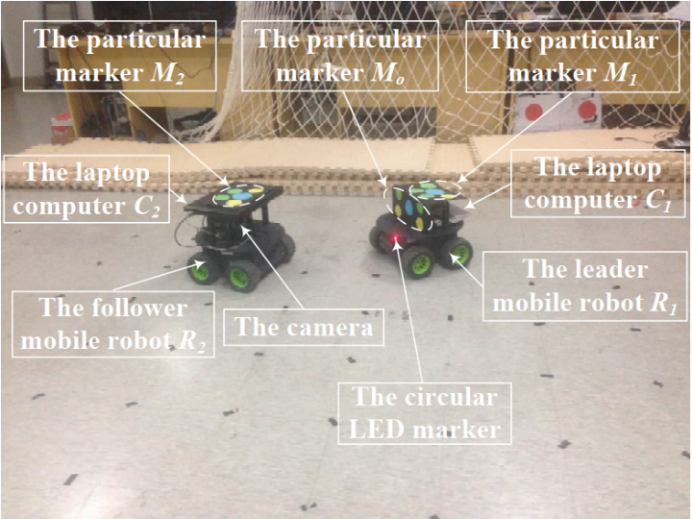
解决了相机完全未知条件下的移动机器人视觉伺服控制问题,相关成果发表于IEEE TRO,IEEE TAC等顶级期刊;解决了感知、通信受限下的移动机器人编队控制问题,相关成果发表于IEEE TRO,IEEE TAC等顶级期刊;解决了相机参数、机器人系统参数不确定情况下的机械臂高性能视觉伺服控制问题,相关成果发表于Automatica,IEEE TCYB等顶级期刊。